Introduction
SimpleDriver2 – is a universal DRSSTC/QCW DRSSTC driver board. It supports many modes, including both phase-shifting and buck-based QCW opertion.
SD is not designed for driving SSTC or induction heaters.
Main features
Bold represents newer features to SimpleDriver 1.0:
- Phase shifting QCW DRSSTC
- Buck-based QCW DRSSTC
- Normal DRSSTC
- Forced start DRSSTC
- Improved FB phase lead
- Overcurrent detection
- Undervoltage lockout
- Even more powerful gate drivers (FDD8424H)
- Optics cable input
- Direct SimpleInterrupter connection
- Tunable gate driving voltage
- Mains AC transformer as power supply
- Onboard feedback generator
- Delayed start after power ON
SD-based Tesla coil designs can be found on TQFP forums.
Power section
Gate drivers got 4 output pins – D+, D-, S+, S-.
D+, D- (direct) non-shifted, non-inverted drive. Always corresponds to feedback signal.
S+, S- (shifted) phase-shifted(phase-shifting QCW only), inverted feedback signal.

Signal polarity is marked with dots. Separeted GDT windings are shown only for visibility, real GDT should be wound with single 3-cored wire.
DRSSRC and phase-shifted QCW DRSSTC connections are the same. QCW and normal DRSSTC modes can be switched with a single QCW jumper.
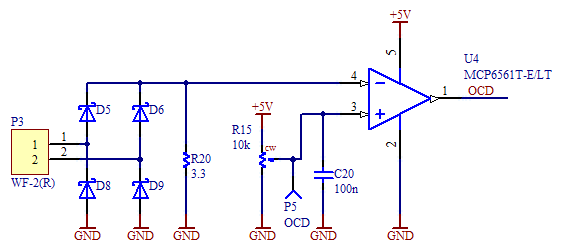
OCD and FB transformer connects like this:
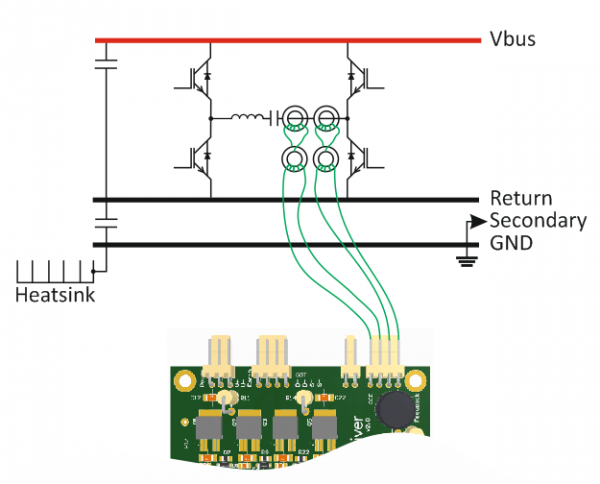
OCD transfromer’s output is full-bridge rectified and can be connected in any way. FB transformer’s signal can be inverted with Invert jumper.
It’s worth mentioning that OCD and FB transformers should not(!) be connected in between MMC and primary winding – primary tank cirquit generates high voltage which can break through FB/OCD transformer’s isolation and damage SD driver board.
Power and UVLO
SD can be powered with AC mains transformer directly or 24V SMSP.
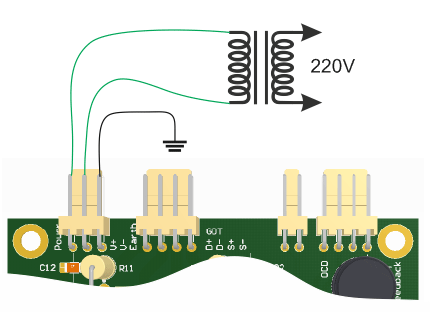
Recommended power parameters – up to 30V DC or 22V AC voltage. Сurrent consumption depends on driver’s load, alshough recommended values are 10W for DRSSTC and 20W for QCW DRSSTC mode.
Undervoltage Lockout – is a simple feature, which prevents operation under low voltages. Driving power section with voltages under 12V will cause poor gate drive, and consequently – overheating and failure.
This condition can occur after turning OFF driver’s power supply while coil operation. In this case UVLO saves the day:

It compares SimpleDriver’s (+Vsupply) voltage with onboard 3.3V regulator. If (+Vsupply) is greater than 22V – LM393 outputs 1 to CPLD’s PowerGood pin. UVLO voltage can be changed by tuning R46’s resistor value.
It can be calculated in our calculatoria.
В случае срабатывания защиты по напряжению, гаснет зеленый светодиод, а тесла отключается “мягко”, дожидаясь пересечения тока в первичном контуре с нулем.
In case (+Vsupply) is lower than UVLO voltage – Green LED goes off and power section shuts down “softly”, waiting till the next zero current crossing.
Jumpers
SimpleDriver’s modes can be switches with 4 onboard jumpers:
- Jumper QCW at position 0 selects DRSSTC mode, position 1 selects QCW DRSSTC mod;
- Jumper Invert at position 1 inverts the feedback signal. In position 0 the signal in non-inverted;
- Jumper Buck in QCW mode selects the buck-based QCW DRSSTC mode and phase-shifted QCW in position 0. In DRSSTC mode Buck jumper turns off forced start feature(position 1);
- Jumper Generate in position 1 replaces feedback signal with RC oscillator.
Indication
SimpleDriver indicates it’s status with 3 LEDs:
- Red indicates an error. Red and green LED indicates overcurrent detection.
- Green indicates that power is good(22V and above) and CPLD is initialised.
- Blue repeats interrupter’s signal.
After power ON CPLD blinks with both green, red and blue LEDs to test the diodes.
Since OCD signal is short – SD stretches it’s indication to 10 ms. In QCW mode SD indicates the actual OCD signal.

DRSSTC mode tune-up
SimpleDriver supports regular DRSSTC mode and can be used for building powerful brick-based(CM300) Tesla coils, including musical ones. The following features are supported: OCD, ZCS synchronisation, phase lead, UVLO. DRSSTC mode shoud be tuned-up before tuning QCW mode.
Warning: All interaction should be made with turned off power section.
- Step 1: connect your power supply;
- Step 2: switch all jumpers to position 0.
- Step 3: calculate your Tesla coil’s resonant frequency. It can be calculated in our calculatoria. It should be lower or higher pole.
- Step 4: tune-up onboard RC oscillator. Square wave at P15 should match(+/- 10 kHz) your coil’s resonant frequency(higher or lower pole).
First of all, oscillator is used for generating forced start pulses(SimpleDriver’s first 4 pulses are generated, then system is switched to feedback frequency). They needed for easier start and making sure your coil starts at specific pole. Oscillator is also used to detect ZCS errors, which will turn driver off to prevent power section failure. To turn forced start off – set Buck jumper to state 1. - Step 5: set overcurrent detection(OCD). You should calculate your power section’s maximum ratings and OCD’s output voltage.
- Step 6: connect your power section and interrupter. Right now, power your power section with isolated 50-80V.
- Step 7: set your feedback transformer’s polarity. For this you should scope coil’s primary current(secondary is siconnected). If there’s specific tank cirquit oscillogram(growing sine) – polarity is fine. Otherwise set Invert jumper to 1.
- Step 8: set phase lead. To make it – you should scope both primary’s current and one of half-bridge’s outputs. Set R10(phase pot) so transistors are switched in zero current cross.
- Step 9: set phase shifter’s saw amplitude(QCW). For this, connect ramp signal to interrupter input and tune Saw pot in a way so Saw signal at Saw via would stretch from 0 to 5V. In DRSSTС mode(QCW jumper = 0) на фазосдвигатель для настройки подается сигнал с генератора, поэтому эту процедуру можно выполнить без подключения силовой части.
- Step 10: Ready!
Phase-shifting QCW DRSSTC tune-up
Режим фазосдвигающего QCW SimpleDriver позволяет добиваться феноменальных соотношений длинны стримера к длине вторичной обмотки. Часто достигается соотношение 10:1. Это возможно благодаря медленному выращиванию стримера, а не резкому пробою воздуха, как это делает DRSSTC.
Для того, чтобы вырастить стример, нужно увеличивать подаваемую в него мощность медленно, компенсируя этим потребление мощности самим стримером. Если подать мощность резко, стример начнет ветвиться и его длинна окажется небольшой. SimpleDriver управляет подаваемой мощностью с помощью фазосдвигающего моста. Теорию его работы можно прочесть в дополнении А, а о том, как работает реализация фазового сдвига – в дополнении Б.
Так как тесла очень плохо стартует в фазосдвигающем режиме, SimpleDriver генерирует 8 периодов колебаний сам, используя частоту генератора, и только потом переключается на работу от обратной связи теслы.
- Шаг 1: Настройте драйвер в режиме DRSSTC.
- Шаг 2: Переведите SimpleDriver в режим QCW. Для этого, установите джампер “QCW” в положение “1”.
- Шаг 3: Проверка рампы. Подключите ваш прерыватель к SimpleDriver и проверьте сигнал в тестовой точке “start”. Низкий уровень сигнала в этой точке соответствует запуску теслы. Убедитесь, что синий светодиод мигает в такт запускающим импульсам.
- Шаг 5: Готово!
Корректор фазы
Корректор фазы нужен для того, чтобы компенсировать задержки переключения транзисторов и добиться мягкого переключения в нуле тока. Это особенно актуально для QCW DRSSTC, где транзисторы переключают большие токи на больших частотах.
В SimpleDriver2 используется двуступенчатый фазокорректор. Первая ступень компенсирует фазу больше чем эту нужно, а вторая – вносит регулируемую задержку. Таким образом решаются сразу две проблемы – легко выбрать мощные компоненты, через которые проходит большой ток и получается плавная регулировка фазы.
Первая ступень состоит из LR цепочки и компаратора. LR-цепочка(L1, R10) выполняет роль нагрузки для токового трансформатора и сдвигает фазу сигнала, а компаратор фильтрует полученный сигнал и преобразовывает его в логические уровни.
Цепочка R3 и С1 задает временной гистерезис. В мощных теслах может понадобится увеличить С1 до 1нф (CM300) или 2.2нф (CM600).
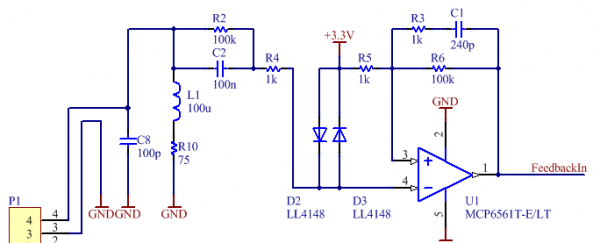
Стадия задержки регулируется RC цепочкой R13 и C23. В случае недостаточной задержки можно увеличить C23.
Если диапазон регулировки не позволяет полностью компенсировать фазовый сдвиг, необходимо увеличить индуктивность катушки L1 или уменьшить резистор R10. Примерные значения можно рассчитать в калькулятории.
Защита по току
В состав SimpleDriver стандартный узел защиты по току. При срабатывании защиты, загорается красный светодиод и тесла “мягко” отключается.
Генератор тестовой обратной связи
SimpleDriver может генерировать обратную связь. Это может быть полезно для того, чтобы снять АЧХ теслы. Для этого нужно перевести джампер Generate в положение 1. Частота обратной связи задается потенциометром Oscillator.
Схема SimpleDriver
Схему скачать можно тут.
Термины
- Фазовый сдвиг – способ управления силовой частью, при которой контроль мощности происходит за счет сдвига по времени переключений полумостов, входящий в состав моста.
- Рампа – аналоговый сигнал, который управляет текущей мощностью теслы. Обычно, имеет вид “пилы”.
Дополнение А: Теория работы фазосдвигающего моста
Фазосдвигающий мост – это топология силовой части, которая хорошо подходит для QCW-режима теслы. Она позволяет контролировать выходное напряжение, работает в режиме мягкого переключения и позволяет передавать управляющие сигналы через трансформаторы управления затворами, так как тут не используется ШИМ.
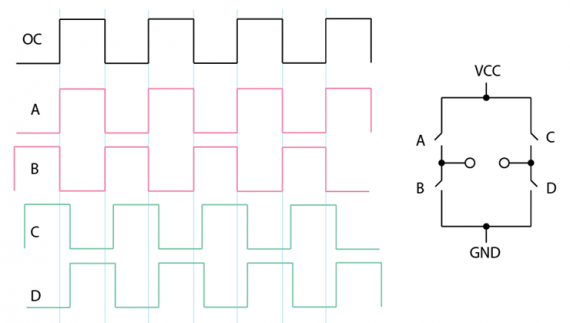
Рассмотрим ее работу подробнее. Силовая часть состоит из двух полумостов, которые управляются раздельно.
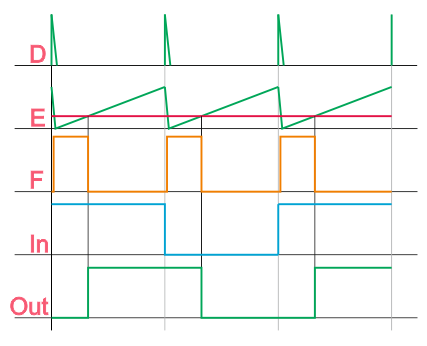
Полученный сигнал F вместе с сигналом обратной связи (In) подается на триггер, где получается сигнал Out. Специальная логика в ПЛИС исправляет проблему, которая появляется, когда напряжение рампы больше напряжения пилы.
Красный сигнал – это управляющий сигнал левого полумоста, зеленый – правого. Как видно, левый полумост переключается синхронно с ОС, а правый – с фазовым сдвигом (запаздыванием). Если этот сдвиг нулевой, то получается обычный полный мост и на выходе появляется двойное напряжение питания. Если-же сдвиг приближается к 180 градусам, то через нагрузку ток не потечет.
Контролируя этот сдвиг, можно контролировать эквивалентное выходное напряжение преобразователя. Оно будет равно
![]()
В преобразователях с жесткой коммутацией, на потери переключения приходится львиная доля всех потерь. Эти потери могут быть в десятки раз больше потерь проводимости, поэтому, важно избавиться от жестких переключений и переключать транзисторы либо в нуле тока (ZCS), либо в нуле напряжения (ZVS), тем самым сильно снизив тепловыделение.
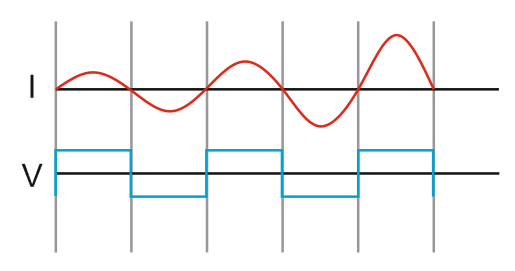
Так как мост нагружен на резонансный контур, а обратная связь осуществляется по току, транзисторы левой его половины переключается в нуле тока. На картинке ниже красный график – ток в первичном контуре, синий – напряжение между выходами полумостов.
Транзисторы правой половины включаются в нуле напряжения. Это происходит благодаря присутствую мертвого времени, когда оба ключа С и D выключены.
После отключения ключа С, индуктивность первичной обмотки будет поддерживать ток. Этот ток будет заряжать паразитные емкости транзисторов, а после того, как они зарядятся, этот ток откроет антипараллельный диод транзистора D. После чего, к транзистору, который должен быть включен, приложено практически нулевое напряжение и его можно включать.
Именно из-за того, что первичной обмотке нужно дать время на зарядку паразитных емкостей, транзисторы нужно включать относительно медленно.
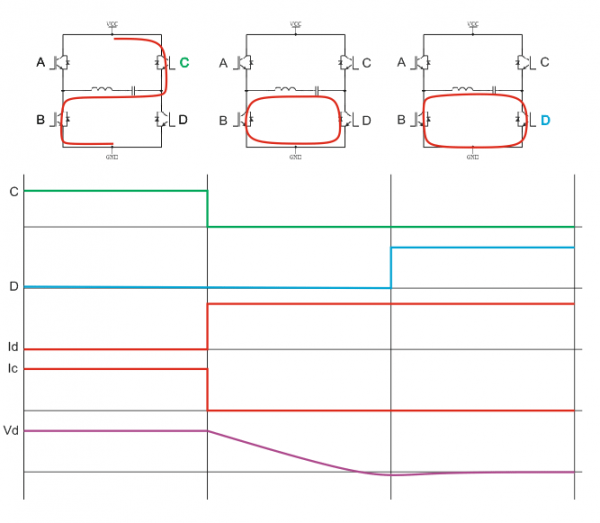
Выключение происходит жестко (транзистор С разрывает весь проходящий через него ток). Это жесткое выключение и является главным источником потерь в силовой части. Для того, чтобы уменьшить эти потери, выключать транзисторы нужно как можно быстрее.
Дополнение Б: Фазовый сдвиг в SimpleDriver
Фазовый сдвиг в SimpleDriver происходит за счет сравнения пилообразного сигнала с сигналом рампы.
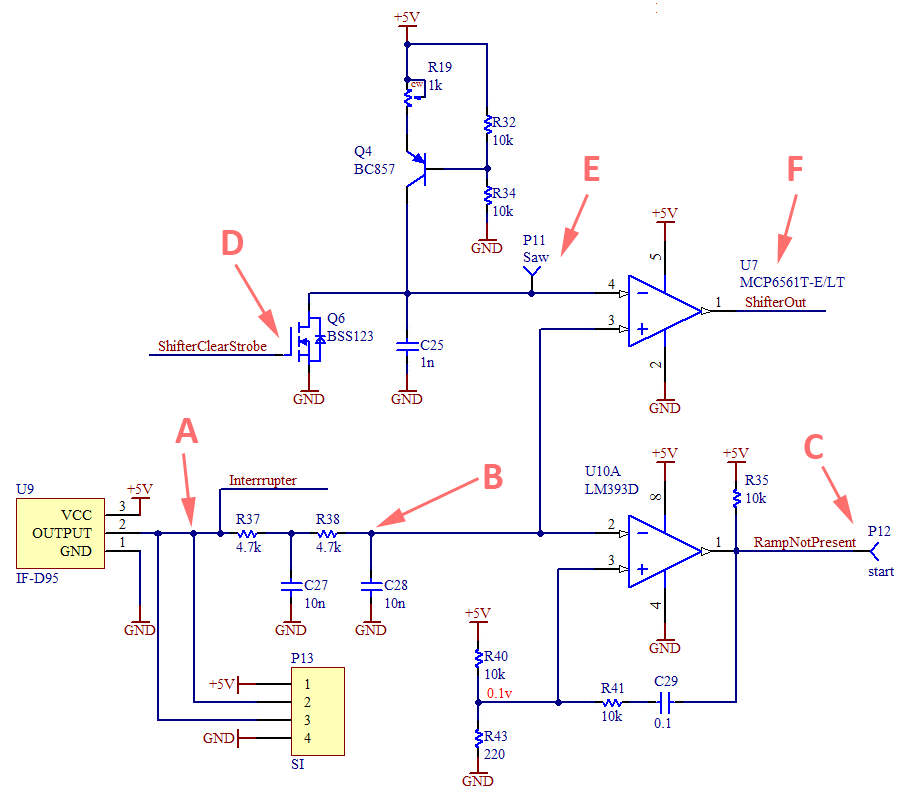
Рампа в виде ШИМ-сигнала подается на оптический или проводной вход, и восстанавливается фильтрами R37-C27, R38-C28. Конечно, можно подавать и аналоговый сигнал.
Для получения сигнала запуска теслы, рампа сравнивается с опорным напряжением, которое снимается с делителя R40-R43.
Чтобы сигнал запуска не дергался в такт переключениям ШИМа, введен гистерезис на элементах R41-C29. В итоге, на тестовом пяточке “start” присутствует сигнал, низкий уровень которого разрешает работу теслы.

На транзисторе Q4 собран источник тока, который создает линейно нарастающее напряжение на конденсаторе C25. При изменении сигнала обратной связи, ПЛИС генерирует короткие (100нс) импульсы, которые подаются на вход ShifterClearStrobe. Они открываются транзистор и сбрасывают напряжение на конденсаторе. В результате, в тестовой точке “Saw” можно наблюдать пилообразный сигнал, который начинается в нуле при изменении обратной связи теслы и линейно растет до следующего такого изменения.
Компаратор U7 сравнивает “пилу” с напряжением рампы. Таким образом, чем выше напряжение рампы, тем больше пила должна вырасти, для переключения компаратора.
Leave a Reply